機械手臂控制VS單晶片
組員: 許原滄
1. 前言
專題的發想來源部分是來自於,近年來娛樂用途的機器人是一個很流行的商品、但價格動輒上萬元起跳不等。在日本、與美國每年都有舉辦一系列的活動或競賽,舉辦國通常會邀請同好來共同參與盛會,剛好趁此次上課中,老師所教授的單晶片的課程,加以實現簡易型機械手臂。
2. 摘要
結構部分: 採用3mm的壓克力板作為結構材質,利用其透明的特性,直接等比例繪出外形圖。搭配手工具如、壓克力專用鋸子裁切。3mm與9mm鑽頭、來完成所有的螺絲孔的加工,小型銼刀工具組來精修組合件。壓克力是很脆的所以會產生裂痕,必須要很小心。
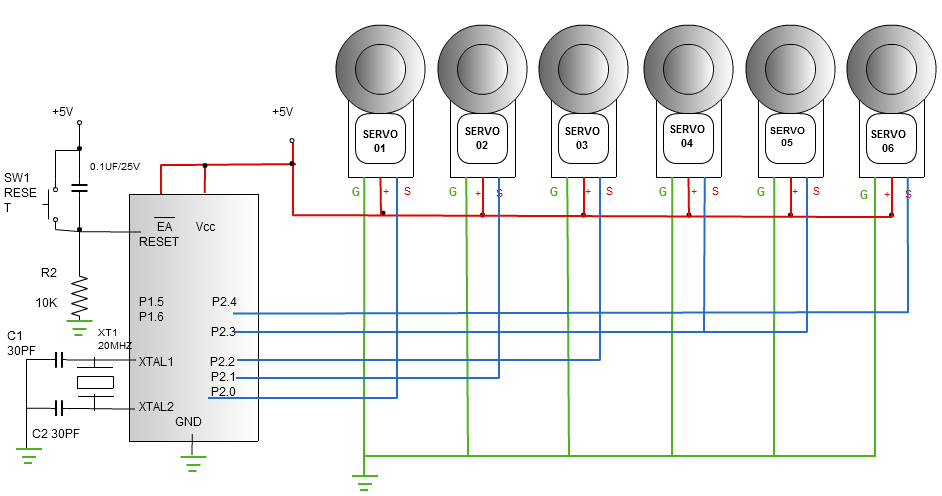
控制部分: 使用ATMEL公司,所生產的晶片AT-89C51。依照datasheet上線路圖,購買元件來銲接完成簡易的電路板。
驅動部分: 選用廣營公司所生產的S03T的標準R/C馬達。
3. 技術簡介
(1).單晶片微電腦ATC89C51內部有ISP(in system programming)功能,如同電腦與單晶片(MCU)的介面。ISP預先將燒錄程式儲存在MCU,不需使用燒錄器,即可將程式碼下載至單晶片中。
(2). PWM (Pulse Width Modulation)稱為脈波寬度調變,常用於LED調光原理、直流馬達的控制、電源變換器之穩壓控制、甚至是直流轉換交流弦波的控制等,是控制直流馬達轉速最常見的方 法。
4. 8051-系統架構
<1>微電腦基本架構
(1).CPU
(2).記憶體
(3).輸入/輸出 port
(4).中斷控制器
(5).計時/計數器
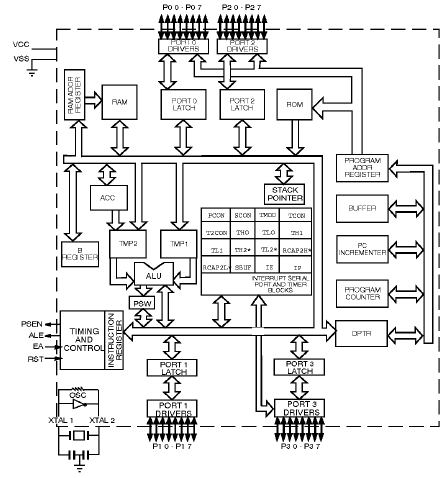
fig1. 8051 內部結構
<2>8051有四個埠,其中port0 & port2 有switch 功能

fig2. 4個port
<3> timer0/counter x 在 mode 1 模式
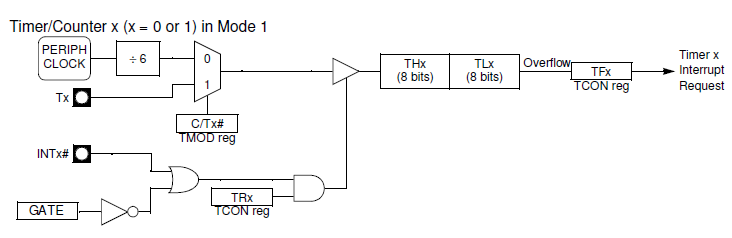
fig3. timer0/counter x
5.程式運作流程圖
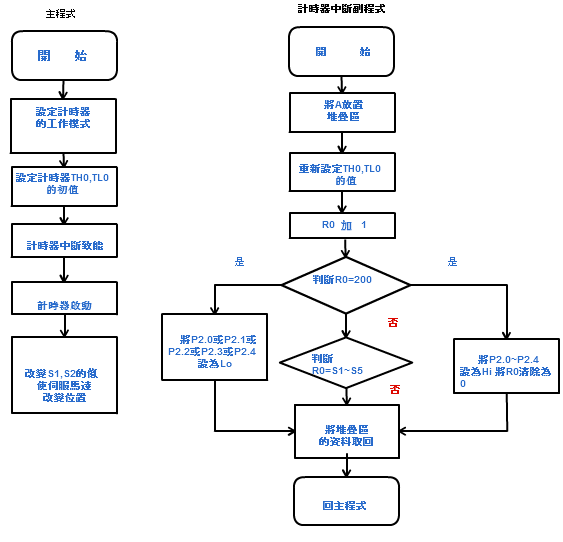
fig4. 程式流程圖
6. 機構展示
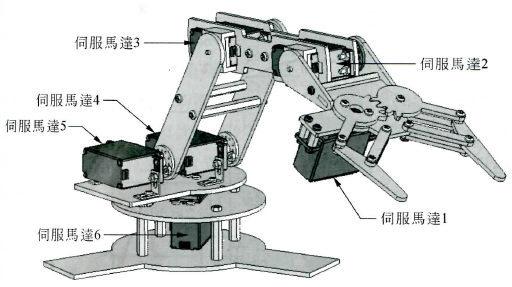
fig5. 機構圖
ps: (資料來源出處 王允上 編著,全華書局,機器人單晶片微電腦控制)
6. 結論
此次的專題製作,以參考等比例的圖面來製作,可以說是挑戰自己的耐力、與智力,化不可能為可能。所有的東西,必須在有限的時間內完成。在過程遇到一些問題,有賴於老師、與同學所給予的寶貴建議作為參考。正如所謂的做中學、學中做。在結構上有很大的配重問題,導致運轉上有瑕疵誤動作,只好外加一些緩衝墊來當作阻尼系統。最後此專題的延伸,有些想法,可以試著加上一熱感應器與影像CCD,搭配的崁入式OS的GUI介面來操作,使手臂可以隨著感應器移動傳回影像,應該會是很有趣的主題。
8. 附件
A. 電路圖