











在AI人工智慧應用中,如果所有資訊都要回傳到雲端中心,計算後再傳回終端的話,一定會有「延遲」產生。而在某些場域中,這種「延遲」卻可能會對人類安全與生命財產造成嚴重威脅,比方說,安控攝影機因延遲而無法即時反映危安事件、自駕車偵測系統因延遲而造成車禍事故。因此,Edge Computing(邊緣運算)概念由此而生。邊緣運算可以加快現場即時反應,讓雲端資料中心負載降低,可以做到訊息的直接反饋,讓資料分析的速度與效率提高。
本課程分成兩個階段。在第一階段,先幫助您紮實培養影像處理的技術能力,讓您透過OpenCV將影像進行影像預處理,降低資料雜訊,增加影像辨識的準確度。在第二階段,採用Intel Movidius神經棒,配合程式碼實作,幫助您學會邊緣運算的實務應用,讓您能直接移植課堂上所學到的solution,搭配您的產業know-how進行調整,讓機器人、自駕車、無人機、無人商店、安控等其他邊緣運算的開發更得心應手!
1.主流單板電腦Raspberry Pi應用教學
使用全球主流的單板電腦Raspberry Pi進行電腦視覺應用,幫助您可以快速掌握邊緣運算與電腦視覺的關鍵技術。
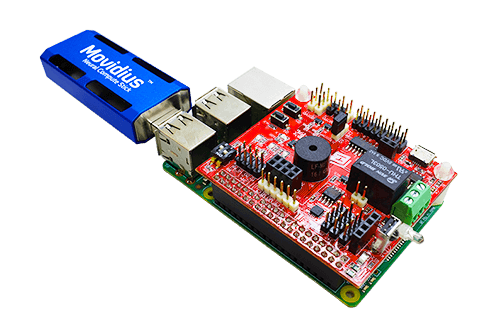
2.教材使用主流VPU--- Intel Movidius Neural Compute Stick(NCS)
使用Intel VPU(Intel Movidius Neural Compute Stick)進行教學,學員專享豐富的教學資源,學習更簡單。
3.資深電腦視覺與嵌入式開發工程師親授
具有豐富開發經驗的資深工程師親自教您產業實務,快速掌握關鍵技術,省下摸索碰壁耗費的時間。
4.實戰程式碼開發教學
做中學,幫助你快速建構開發觀念,透過完整開發程式碼,提高學習效率,快速獲得職能,縮短開發時間。
1.熟悉數位影像於電腦中的表現形式(儲存格式、讀取及寫入、像素運算…)和影像處理方法(影像去雜訊、影像品質增強、影像重採樣…)。
2.理解並能實作數位電腦視覺 (影像特徵提取、特徵強化、輪廓萃取、卷積運算、型態學運算、分水嶺演算法、距離轉換…) 原理應用與具備活用 OpenCV 函式庫之能力,包含:影像處理、影片(視訊)處理、高階 GUI 工具(圖形互動介面)、Image Processing 演算法實務、Computer Vision 演算法實務。
3.融會貫通基礎演算法及函示庫工具,並且有能力實作自己的視覺演算法或影像分析模型 (Prototype)
4.了解深度學習中的影像處理網路,卷積神經網路(CNN)之架構與應用方法。
5.學會Raspberry Pi的必會操作。
6.對Edge Computing(邊緣運算)的趨勢與應用有更深入的了解。
7.學會用Intel Movidius Neural Compute Stick(NCS)在Raspberry上實現邊緣運算之應用(人臉識別、物件識別…)並了解整個影像處理流程。
※點選課程可展開看更多
➤階段 1-1: 影像處理必懂觀念與作業環境建置教學
-
影像處理觀念介紹
-
數位影像的生成與結構
-
-
OpenCV介紹與環境建置
-
OpenCV函式庫實務應用說明與演示
-
環境設置與必會指令實作(最新版本OpenCV-3.3.x)
-
-
影像格式與資料結構
-
影像格式與基本資料型態說明
-
-
影像格式與資料結構
➤階段 1-2: 影像前處理/預處理實戰
-
電腦視覺概述
-
像素層級運算 (Pixel Level)
-
OpenCV Data Type結構深入理解
-
-
影像前處理 (原理 & 實作)
-
影像二值化 、閾值分析、影像去雜訊、影像模糊、影像強化、影像縮放、色彩空間轉換等
-
-
OpenCV 使用者介面事件 (高階 GUI)
-
滑鼠與滑桿事件處理
-
-
OSD繪圖與文字處理
-
ROI處理
-
OpenCV 使用者介面事件 (高階 GUI)
-
型態學運算、輪廓搜尋 & 提取、邊緣偵測
-
-
從影像處理到電腦視覺(原理 &實作 )
-
Image Feature Extraction 、直線偵測、圓形偵測、角點偵測
-
-
從影像到影片 Video Processing&Analysis
-
影片資料處理
-
攝影機取像 、運算 、儲存
-
-
OpenCV人臉偵測
-
從影像到影片 Video Processing&Analysis
-
手把手帶你打造自己的影像辨識演算法
-
【追古朔今】
-
-
OpenCV版本差異 & IplImage理解+演練
➤AI邊緣運算系統開發實作
-
邊緣運算(Edge Computing)導論
-
邊緣運算的趨勢與應用場域
-
AI硬體的戰場 : VPU、GPU、FPGA
-
AI領域的新藍海 : 嵌入式AI
-
-
AI邊緣運算開發環境建置
-
Edge裝置Raspberry Pi基本操作教學
-
Intel神經加速棒 (NCS ,Movidius Neural Compute Stick)介紹
-
虛擬機與ubuntu系統安裝教學
-
Intel OpenVINO(Open Visual Inference and Neural network Optimization)介紹與應用範疇
-
虛擬機之Intel OpenVINO安裝教學
-
常見開發環境建置之問題與除錯(Debug)解說
-
TensorFlow on your Raspberry Pi & NCS API設定
-
Lab:
-
靜態圖像辨識
-
性別與年齡辨識
-
動態影像辨識
-
-
-
在硬體上佈署影像模型前的關鍵-模型轉換
-
為什麼要進行模型轉換?
-
模型格式介紹(IR、.bin、.xml…)
-
模型格式轉換流程解說
-
小試身手:YOLO on Raspberry Pi
-
➤AI邊緣運算主題實作 (此階段將任擇兩主題進行教學)
-
智能即時手寫數字辨識系統實作
-
智能即時手寫數字辨識系統體架構介紹
-
手寫數字資料集之選用、分類與整理
-
數字偵測與辨識模型解說
-
數字辨識pre-trained model載入
-
智能即時手寫數字辨識系統實現
-
問題研討
-
-
智能皮膚檢測系統實作
-
圖像檢測系統之整體架構介紹
-
皮膚圖像訓練資料集之選用、分類與整理
-
皮膚圖像深度學習模型之應用與解說
-
皮膚圖像片模型之學習成效檢核、評估方式(accuracy、loss、confusion matrix…)
-
Python web框架(Flask)之使用與生產用途之環境建置方式介紹
-
Restful API 設計機制
-
問題研討
-
-
商品辨識智能系統實作
-
商品辨識智能系統實作之整體架構介紹
-
商品訓練資料集之選用、分類與整理
-
商品(物件)偵測與辨識模型解說
-
商品辨識pre-trained model載入
-
商品辨識智能系統實現
-
問題研討
-
-
人臉結帳智能系統實作
-
人臉結帳智能系統之整體架構介紹
-
人臉識別技術解說
-
消費訊息推播實作 : Python與node.js之整合應用(ex.Linebot)
-
人臉結帳智能系統實現
-
問題研討
-
-
智慧停車場車牌辨識系統實作
-
智慧停車場車牌辨識系統之整體架構介紹
-
車牌偵測
-
車牌影像前/預處理:影像灰階化、邊緣檢測、形態學運算 車牌字元處理:字元分割、字元辨識
-
智慧停車場車牌辨識系統實現
-
問題研討
-
-
銀髮照護之跌倒偵測示警系統實作
-
銀髮照護之跌倒偵測示警系統之整體架構介紹
-
人體動作識別多任務深度學習模型解說:Multitask CNN
-
人體動作識別多任務深度學習模型解說:Multitask CNN
-
單人與雙人動作識別之pre-trained model載入
-
警示訊息通知 : 蜂鳴器、line警示訊息推播
-
銀髮照護之跌倒偵測示警系統實現
-
問題研討
-
-
AIoT智能居家聲控系統實作
-
AIoT智能居家聲控系統實作之整體架構介紹
-
語音訓練資料集之選用、分類與整理
-
語音深度學習模型之應用與解說
-
如何移植你的pre-trained model
-
遠端控制之通訊協定實現 : MQTT
-
Python與node.js之整合應用:用line chatbot實現聲控系統
-
問題研討
-
- 對電腦視覺與邊緣運算有興趣的您。
- 即將投入電腦視覺與邊緣運算應用的工程師或專案人員,像是AOI(自動光學檢測)、自駕車、人臉識別、車輛識別、VR/AR、安防、機器人開發…。
- 正從事電腦視覺與邊緣運算應用的工程師或專案人員,想了解如何加快開發流程的技術。
- 想學會電腦視覺演算法撰寫、測試與調校的您。
- 沒相關背景但對電腦視覺有興趣,或是接觸過卻似懂非懂,不知如何開始的學員。
★本課程沒有高深複雜的數學原理,只要具備簡單高中數學基礎即可,依照老師教學進度Step by Step學習,就可以自然而然地學會影像辨識的觀念與技術。


Joseph
▪ 台灣大學電機工程系博士研究
▪ 上市網通科技公司 / 資深軟體工程師
▪ 嵌入式Linux系統 / ARM Boot Loader / 資料結構及演算法 / PCB LayoutMCU 韌體設計/ Linux 驅動程式 / Linux系統程式 / 網路通訊協定

Lau
▪ 中正大學電機工程碩士 ▪ 國內記憶體龍頭廠:研發技術副理
▪ 知名新創影像分析公司:技術顧問/電腦視覺科學家
▪ Computer Vision ▪ OpenCV影像處理與電腦視覺
▪ 嵌入式Linux系統、C/C++、GPGPU 技術 (nVidia CUDA)
- 智慧型協作產品研發工程師
- 機器人產品開發工程師
- 電腦視覺研發工程師
- 嵌入式系統/機器人應用工程師
- 演算法感測融合開發工程師(sensor fusion algorithm developer)
- 軟體研發工程師(機器人/自駕車/無人機…)
1.什麼是邊緣運算?
依據維基百科的定義,邊緣運算(英語:Edge computing),又譯為邊緣計算,是一種分散式運算的架構,將應用程式、數據資料與服務的運算,由網路中心節點,移往網路邏輯上的邊緣節點來處理。邊緣運算將原本完全由中心節點處理大型服務加以分解,切割成更小與更容易管理的部份,分散到邊緣節點去處理。邊緣節點更接近於用戶終端裝置,可以加快資料的處理與傳送速度,減少延遲。在這種架構下,資料的分析與知識的產生,更接近於數據資料的來源,因此更適合處理大數據。
2.Movidius特色是什麼?
Movidius 主要擅長的是視覺辨識,影像處理速度比一般CPU快,而且因為耗電量低,所以很適合放在會移動的物品上。無人空拍機還有掃地機器人都可以裝置 Movidius AI 晶片提高辨識環境的功能,增加使用效果。
3.使用 NCS2 之常見問題與排解方式有哪些?